







——DWIN डेव्हलपर फोरम कडून
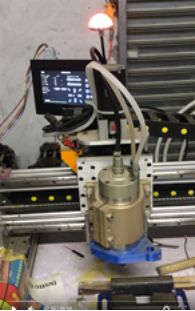
सोल्यूशन मुख्य नियंत्रण म्हणून T5L चिपचा अवलंब करते, सीरियल पोर्ट 2 द्वारे GRBL नियंत्रित करते आणि X, Y आणि Z अक्षांचा खोदकाम मार्ग बेस मार्ग तयार करण्यासाठी एनग्रेव्हिंग मशीनचे मुख्य इंजिन नियंत्रित करण्यासाठी मोटर चालवते, जेणेकरून लक्षात येईल स्वयंचलित खोदकाम ऑपरेशन.यात सुंदर इंटरफेस, अचूक नियंत्रण, बहु-अक्ष नियंत्रण आणि स्वयंचलित टूल सेटिंगची कार्ये आहेत.
वर्णन:
1. DWIN सिरीयल पोर्ट 2 द्वारे GRBL नियंत्रित करा;
2. GRBL सिरीयल पोर्ट संदेश, विभाजन आणि इंटरसेप्शन डिस्प्ले ओळखतो;
3. स्क्रीन विविध फंक्शन्स नियंत्रित करते जसे की GRBL हालचाली सूचना पाठवून;
4. समर्थन हँडव्हील नियंत्रण, Weihong हँडव्हील इंटरफेस व्याख्या सुसंगत;
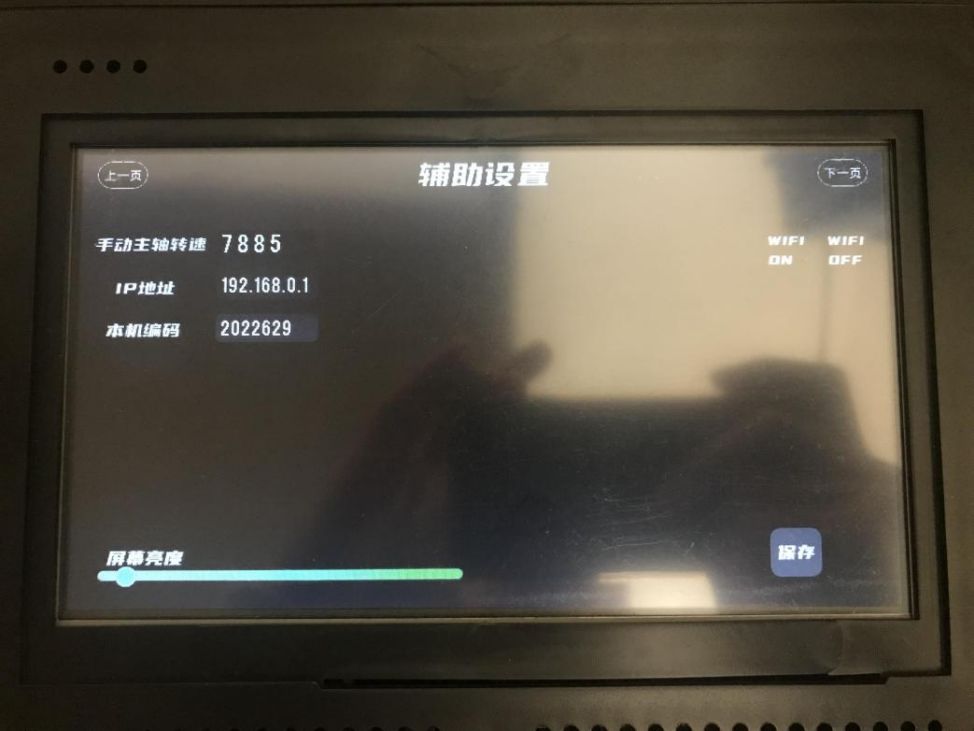
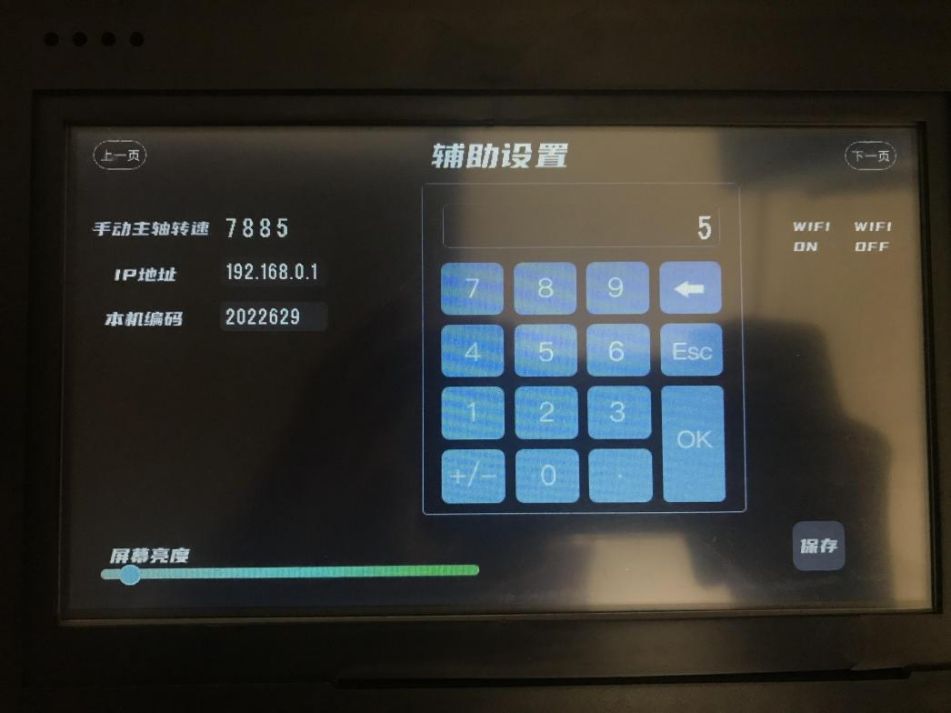
5. पॉवर बंद केल्यानंतर स्क्रीन पॅरामीटर्स जतन केले जाऊ शकतात;
6. निष्क्रिय, थांबा आणि काम यासारख्या स्थिती दिवे प्रदर्शित करण्यासाठी WS2812 नियंत्रित करून;
समाधान डिझाइन:
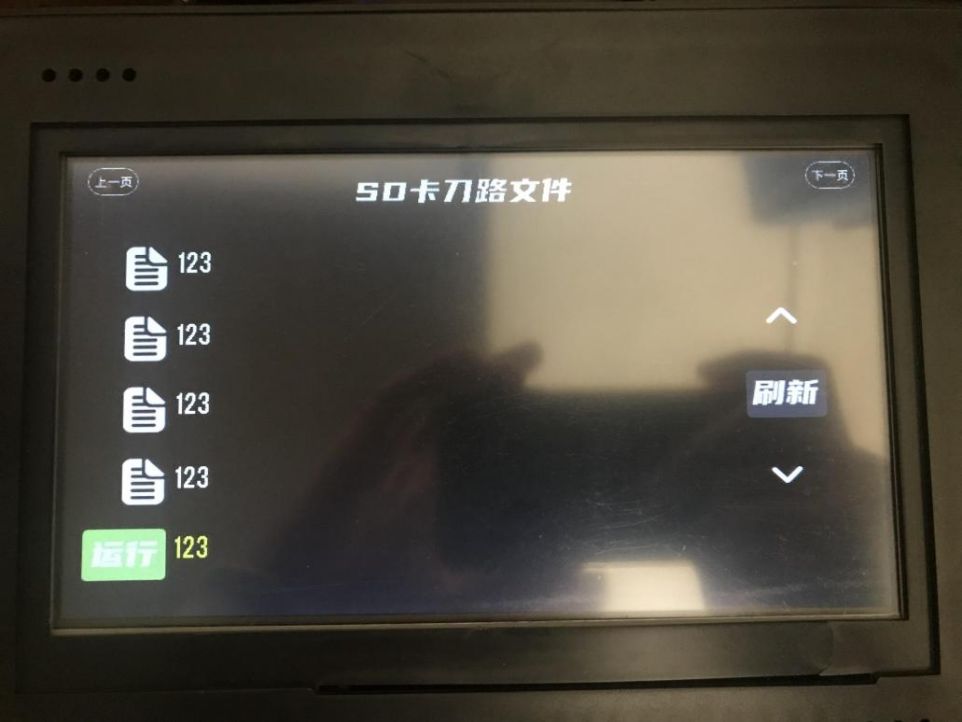
(1) DGUS अभियांत्रिकी इंटरफेस डिझाइन रेखाचित्र

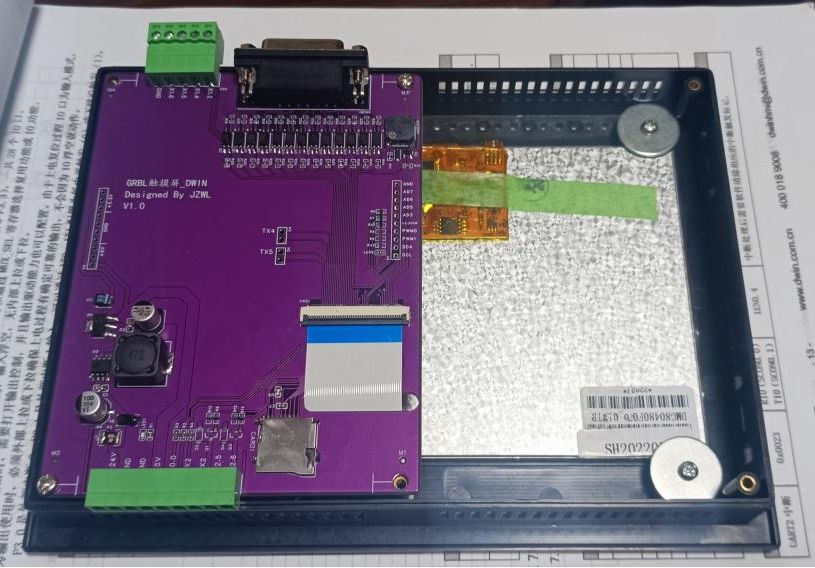
(2) बॅकप्लेन आकृती

सूचना:
1. GRBL ची ESP32 मूळ आवृत्ती बदलाशिवाय वापरू शकते;
2. Easytron सह स्क्रीन PCB फाइलचे डाउनलोड संलग्नक उघडा, आणि त्याचे योजनाबद्ध आकृती आणि PCB थेट प्रूफ केले जाऊ शकतात;
3. कर्नल फाइल नवीनतम असावी.हा प्रकल्प संलग्नकातील कर्नल आवृत्ती वापरतो आणि कर्नल स्वतंत्रपणे अद्यतनित करणे आवश्यक आहे.
पोस्ट वेळ: जानेवारी-10-2023